Lead project
Robotics field tooling + sensing
PerPlant combined ROS2 field sensing with cleaner computer-vision dataset workflows.
This is the closest match to the robotics-software story: wiring sensing into field collection, carrying metadata through the workflow, and building data tools that make downstream perception work less brittle.
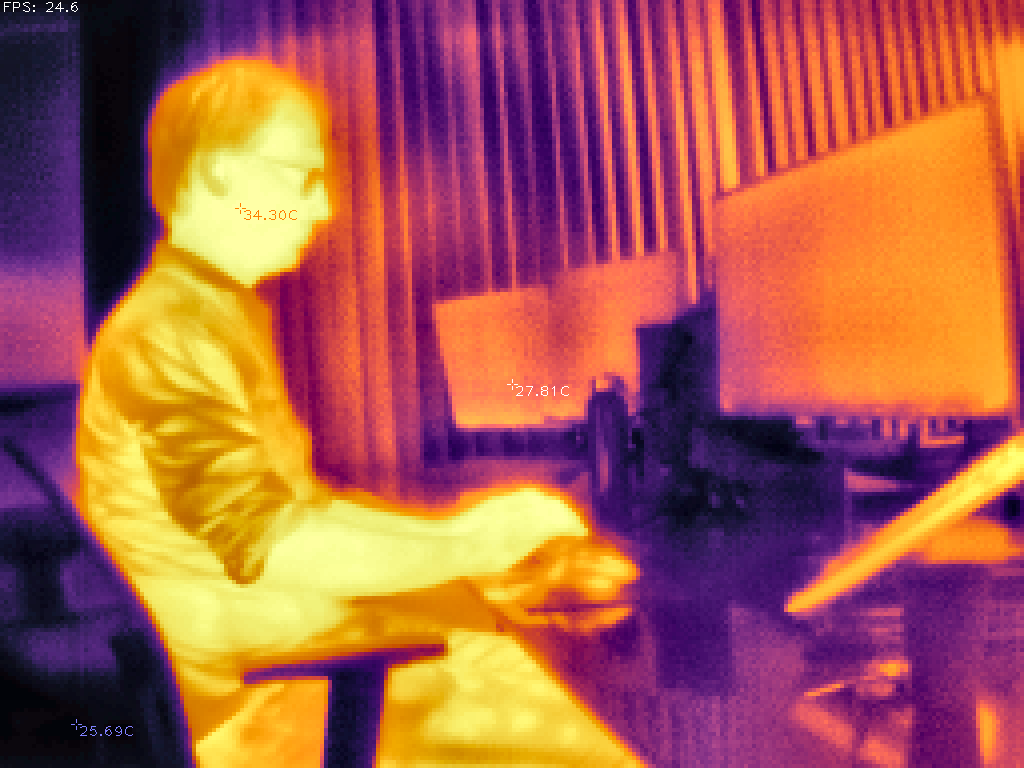
- Thermal + GPS collection was built around real field conditions, not ideal capture.
- Filtering, embeddings, clustering, and grouped splits were used to reduce leakage and redundancy.
ROS2Thermal + GPSDataset quality
Collection
ROS2 thermal imaging
Metadata
GPS-tagged field capture
Curation
Representative subsets