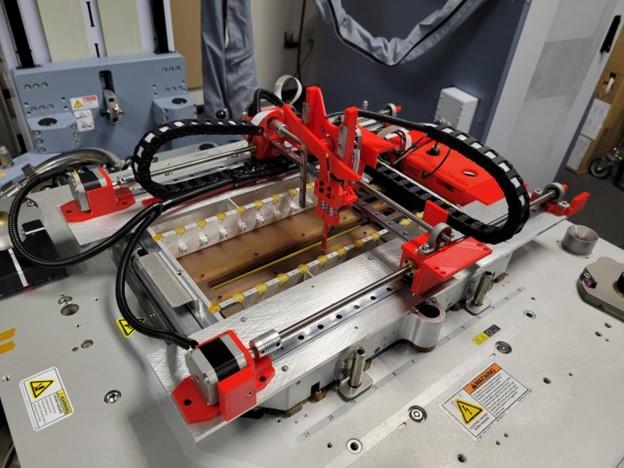
Integrated Cartesian robot
The full system combined motion hardware, connector targeting, and the broader automation flow around mating and verification.
Robotics + controls
This project focused on automating coaxial connector mating during test procedures with a Cartesian robot, tool-changing logic, and sensing-informed control.
What I contributed
I handled the programming side of the robot, including remote operation, automatic tool changing, load-cell-based closed-loop control, and a redesigned GUI for running automation workflows more clearly.
What came out of it
The project reached 0.01 mm travel precision and 0.5 g load standard deviation, and the work was associated with an IEEE publication.
The full system combined motion hardware, connector targeting, and the broader automation flow around mating and verification.
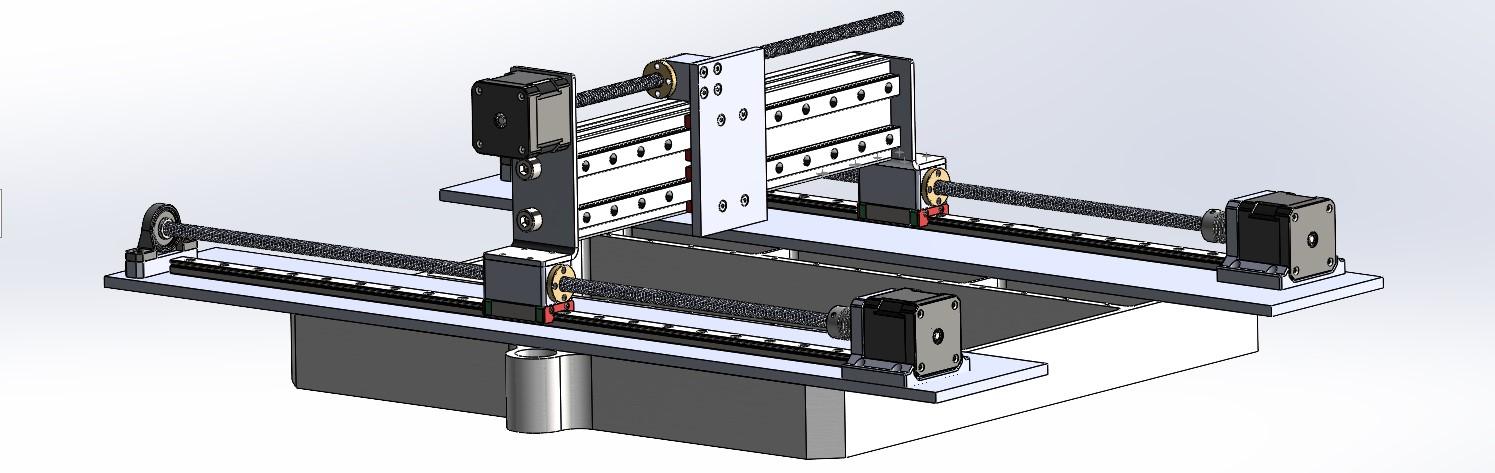
An early CAD-stage view of the redesign, used to work through the mechanical layout before integration.
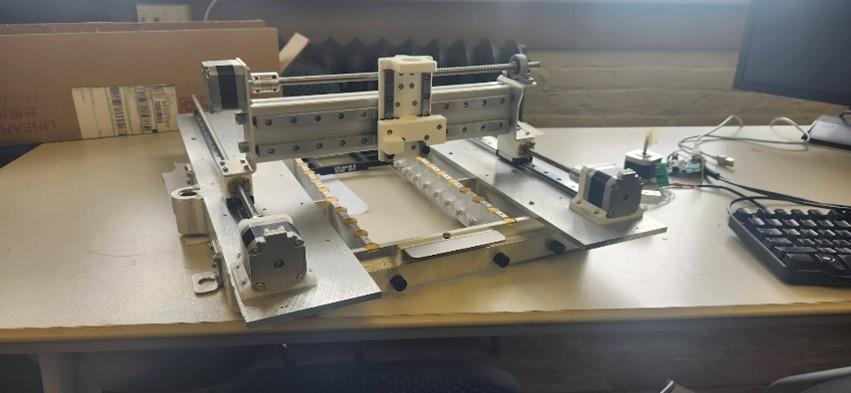
Initial assembly with linear rails, anti-backlash hardware, and the base structure for the coupling setup.
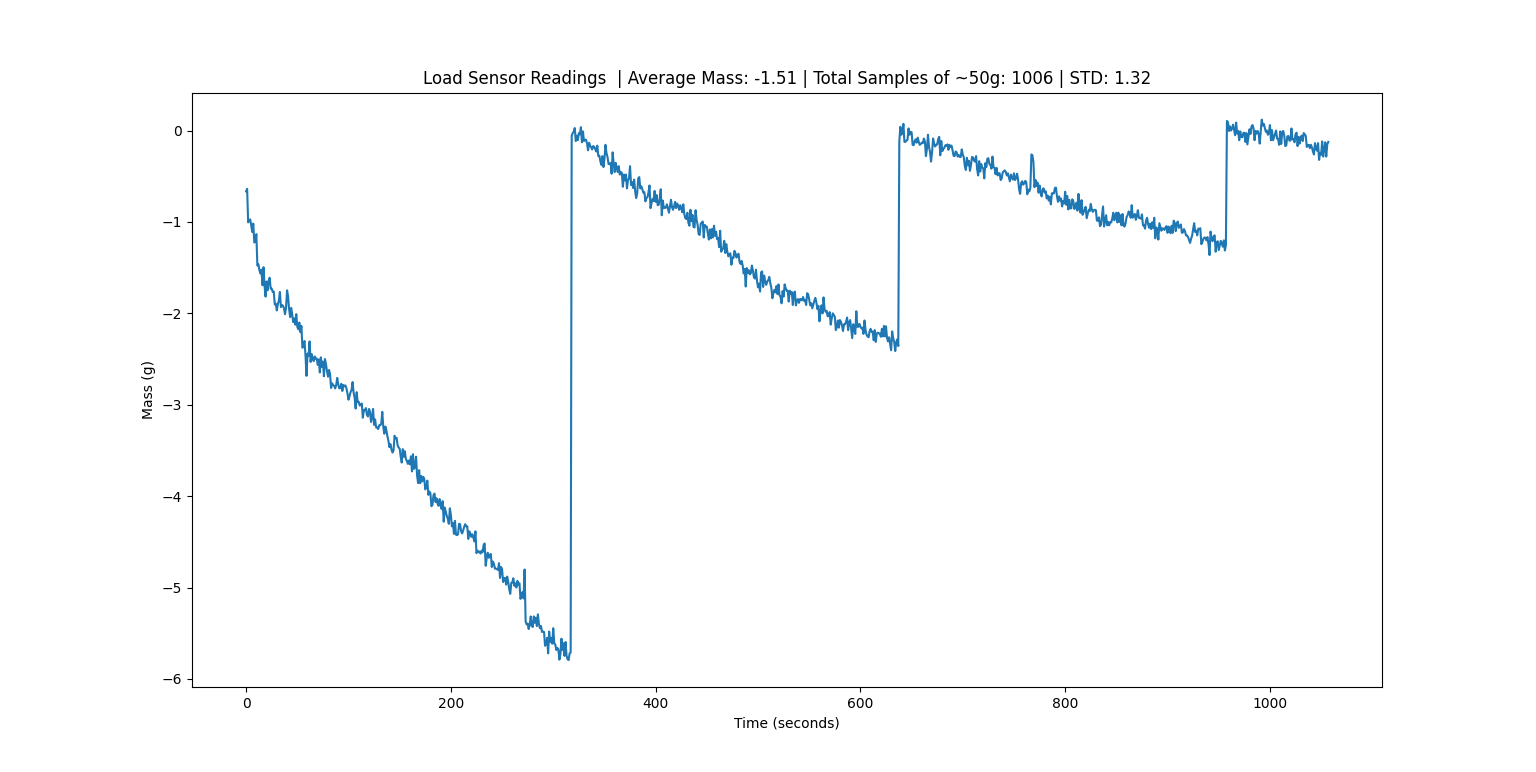
Bench testing around the cantilever load cell used for force-aware mating logic and closed-loop behavior.
A narrated look at the GUI redesign and scheduling flow developed for more usable automation control.
One example of the robot executing a connector mating sequence with verification on the system side.